手搓神经网络系列之 —— 池化与 BN 层
结束了本系列最硬核的卷积反向传播部分,从这篇文章开始,将进入比较软核的内容,本文来介绍池化运算和 BN 层的正反向传播。
本文涉及到的数学公式比较多,网页前端渲染会比较慢,烦请耐心等待和阅读。
本系列全部代码见下面仓库:

如有算法或实现方式上的问题,请各位大佬轻喷 + 指正!
池化
池化运算(Pooling),是一种对数据的采样方式,通过减小数据的分辨率尺寸来加速运算,其本质是信息完整性与运算速度的妥协。最常用的池化操作即最大池化(MaxPooling),过程如下图所示:
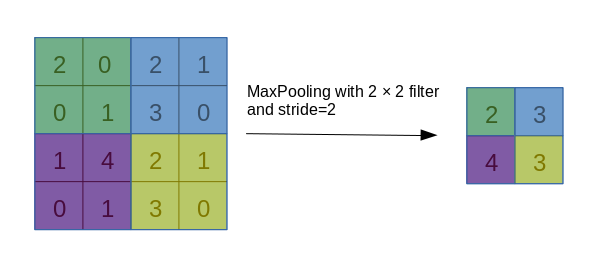
一般而言,以上面这种池化核尺寸为 2、步长为 2 的池化操作最为常用。还有一种平均值池化,则是把每一块的最大值运算换成平均值运算。
前向传播
池化与卷积很像,因此前向传播时,我们可以利用前面卷积时用到的 split_by_strides 函数,以下给出 MaxPooling 的前向传播:
def max_pool2d(x: Tensor, kernel_size, stride=None):
assert x.ndim == 4, 'x must be 4 dimensional'
kernel_size = _pair(kernel_size)
stride = stride or kernel_size
stride = _pair(stride)
split = split_by_strides(x.data, kernel_size, stride)
max_data = np.max(split, axis=(-1, -2))
argmax = np.argmax(split.reshape(-1, kernel_size[0] * kernel_size[1]), axis=-1).flatten()
output = Tensor(max_data, requires_grad=x.requires_grad)
if output.grad_enable:
output.children = [(x, argmax, kernel_size, stride)]
output.grad_fn = MaxPool2dBackward()
return output与卷积类似,我们通过 split_by_strides 函数就可以直接把数据按块分割出来,然后对最后两个维度进行取最大值运算即可。
反向传播
反向传播的思路也很简单,与前面的 Max 运算的思想是一样的,区别在于若遇到存在多个最大值的情况,只为第一个最大值传回梯度,其余的则传回 0。
我直接用循环解决了:
class MaxPool2dBackward(BackwardFcn):
def calculate_grad(self, grad, children, place):
x, argmax, kernel_size, stride = children[0]
new_grad = np.zeros_like(x.data)
B, C, H, W = grad.shape
for index, m in zip(product(range(B), range(C), range(H), range(W)), argmax):
b, c, h, w = index
mh, mw = m // kernel_size[1], m % kernel_size[1]
new_grad[b, c, h * stride[0] + mh, w * stride[1] + mw] += grad[b, c, h, w]
return new_grad说来惭愧,我用循环的原因是目前没有想到更好的适应一切情况的方法,不过,池化的反向传播因为不涉及到矩阵运算,所以感觉用循环也没事,不怎么影响运行效率。
这里的代码都非常容易理解,我就不再解读了(其实是因为太不优雅了而不想解读)。
AvgPooling 和 MaxPooling 类似,这里不再贴代码。
BN 层
BN 层,全称 Batch Normalization 层,作用是稳定数据分布、加速训练,经常被用在神经网络的激活函数之前。
BN 层的正向传播分为训练阶段和测试阶段两种情况。
在训练阶段,BN 层需要收集数据的一些统计信息,BN 层在拿到每一批次的数据后,首先要计算出这批数据每一个通道的均值、方差,拿到均值和方差后,BN 层通过滑动的方式动态更新自己的 running_mean 和 running_var 属性,即滑动均值和滑动方差,最后,用计算出来的均值、方差对数据的每一个通道进行标准化:
但若就这么结束了,将会带来很大的问题,因为数据在被标准化之后,前面所有层学习到的特征也会被破坏,因此 BN 层还引入了两个可训练参数
在测试阶段,BN 层使用训练时收集到的 running_mean 和 running_var 对数据进行归一化,使用训练时学习到的
数学推导
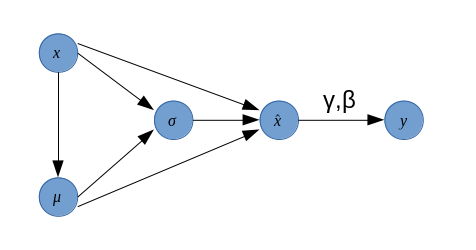
根据以下传播公式,我们给出 BN 层反向传播的梯度推导。
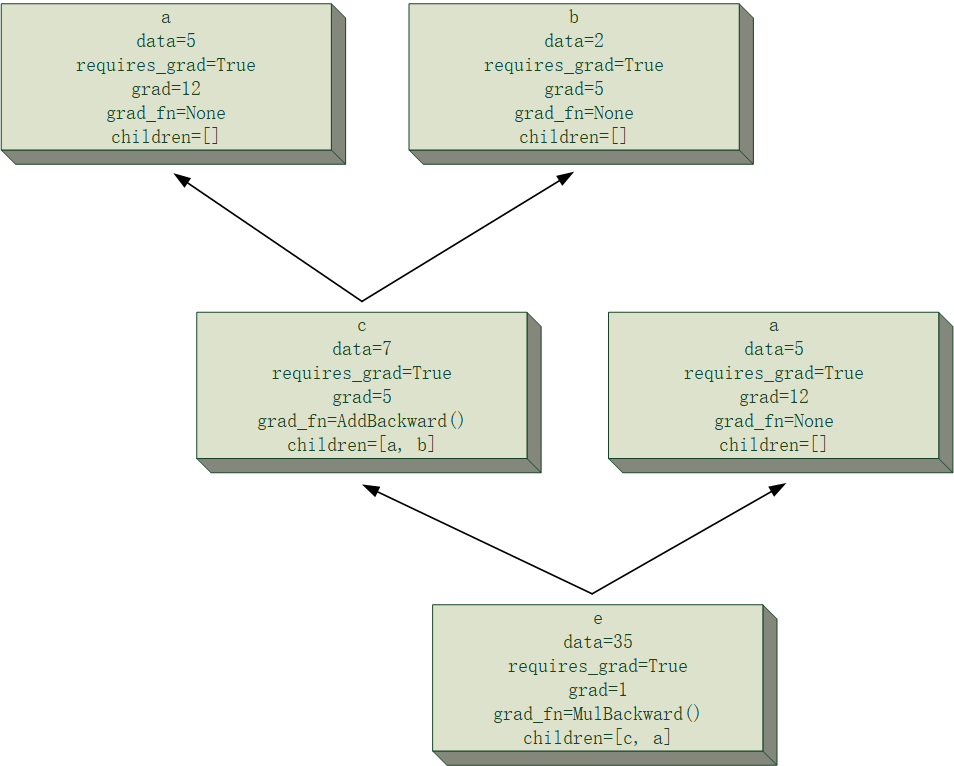
下面来计算梯度,为清晰起见,我们先画出上述式子的计算图:
我们首先对
然后作为跳板,我们计算
接下来计算最复杂的
目前
根据
易知
由
由
现在,所有的梯度都已经算出来了,我们将它们代回原式,通过一些化简,可以求出
代码
最后,给出 BN 层正反向传播的代码:
正向传播
def forward(self, x: Tensor)
axis = (0, -1, -2)[:x.ndim - 1]
if self.training:
batch_mean = Tensor(np.mean(x.data, axis=axis, keepdims=True))
batch_var = Tensor(np.var(x.data, axis=axis, keepdims=True))
if self.track_running_stats:
self.running_mean = (1. - self.momentum) * self.running_mean + self.momentum * batch_mean
self.running_var = (1. - self.momentum) * self.running_var + self.momentum * batch_var
return F.batch_norm(x, batch_mean, batch_var, self.gamma, self.beta, self.eps)
if self.track_running_stats:
return F.batch_norm(x, self.running_mean, self.running_var, self.gamma, self.beta, self.eps)
batch_mean = Tensor(np.mean(x.data, axis=axis, keepdims=True))
batch_var = Tensor(np.var(x.data, axis=axis, keepdims=True))
return F.batch_norm(x, batch_mean, batch_var, self.gamma, self.beta, self.eps)首先,根据输入数据 x 的维数(3 或 4),确定计算均值和方差时用到的 axis(相当于去掉了 Channel 所在的 1 轴),接下来的操作分为 training 阶段或 eval 阶段,具体过程前面已经讲过了,这里省略一千字,直接来到最后调用的 batch_norm 函数。
def batch_norm(x: Tensor, mean: Tensor, var: Tensor, gamma: Tensor, beta: Tensor, eps=1e-5):
axis = (0, -1, -2)[:x.ndim - 1]
x_hat = (x.data - mean.data) / np.sqrt(var.data + eps)
output = Tensor(np.expand_dims(gamma.data, axis) * x_hat + np.expand_dims(beta.data, axis), requires_grad=x.requires_grad or gamma.requires_grad or beta.requires_grad)
if output.grad_enable:
output.grad_fn = BatchNormBackward()
output.children = [(x, x_hat, mean.data, var.data, eps), (gamma, None), (beta, None)]
return outputbatch_norm 函数也没啥好讲的,就是老老实实按前面的公式进行计算得到 gamma、beta 在这里没办法直接 broadcast(它俩的形状都是 (C,),而 x_hat 的形状则是 (B, C, H, W) 或 (B, C, L),因此需要手动扩展维度再进行 affine 运算)。
在计算图的 children 中,也额外放了一些信息,分别对应前面公式里的
接下来是反向传播代码:
class BatchNormBackward(BackwardFcn):
def calculate_grad(self, grad, children, place):
x, x_hat, mean, var, eps = children[0]
axis = (0, -1, -2)[:x.ndim - 1]
gamma = children[1][0]
grad_x_hat = grad * np.expand_dims(gamma.data, axis)
if place == 0:
n = grad.size / grad.shape[1]
dx = n * grad_x_hat - np.sum(grad_x_hat, axis=axis, keepdims=True) - \
x_hat * np.sum(x_hat * grad_x_hat, axis=axis, keepdims=True)
dx = dx / (n * np.sqrt(var + eps))
return dx
elif place == 1:
return np.sum(x_hat * grad, axis=axis)
else:
return np.sum(grad, axis=axis)由于梯度的公式已经明明白白地写在了前面,这里的反向传播代码基本没啥可说的了,只要注意一下不要搞错维度就行。
可能有朋友会问,我们不是已经实现了这些基本运算的梯度传播了嘛,为什么还要大费周章地进行人力求导呢?这是因为我们计算了梯度之后发现,x 的梯度可以利用很多已经得到的信息(如 x_hat)进行快速计算,把这个计算图的反向传播过程打包成一个 BatchNormBackward,在运算效率上有一定的提升,这样的例子还有不少,例如我前面已经提过一次的交叉熵损失函数。
本文虽然不算硬核,但涉及到的数学公式推导相对于前面的卷积更复杂些,希望诸位能自己在纸上从头至尾推导一遍,这块内容只要能把公式推出来,代码只是水到渠成。
如果对池化的反向传播有更好的建议,麻烦告诉我!
至此,计算图、反向传播部分已经实现的差不多了(其实反向传播还有一堆没写 hhh,但不重要,这些只是时间问题罢了),后面的文章将完善模型的优化部分,最后将尝试通过自己写的神经网络来训练一个简单的模型。
- V me 50!
- Alipay is also ok~
































































































































































































































































































































































































































.png)
.jpg)
.jpg)
.gif)
.jpg)
.gif)
.jpg)
.jpg)
.gif)
.jpg)
.gif)
.jpg)
.gif)
.jpg)
.png)
.jpg)
.jpg)
.gif)
.jpg)
.jpg)
.jpg)
.gif)
.gif)
.gif)
.jpg)
.gif)
.jpg)
.gif)
.jpg)
.gif)
.gif)
.gif)
.jpg)
.gif)
.jpg)
.gif)
.jpg)
.gif)
.jpg)
.jpg)
.gif)
.jpg)
.jpg)
.gif)
.gif)
.jpg)
.png)
.jpg)
.jpg)
.gif)